Pioneer 2 User Manual
Page 24
Quick Start
18
waiting state. The
sync
number
3
is a special error code indicating you have a noisy communication line;
you must reduce the noise level before operating Saphira.
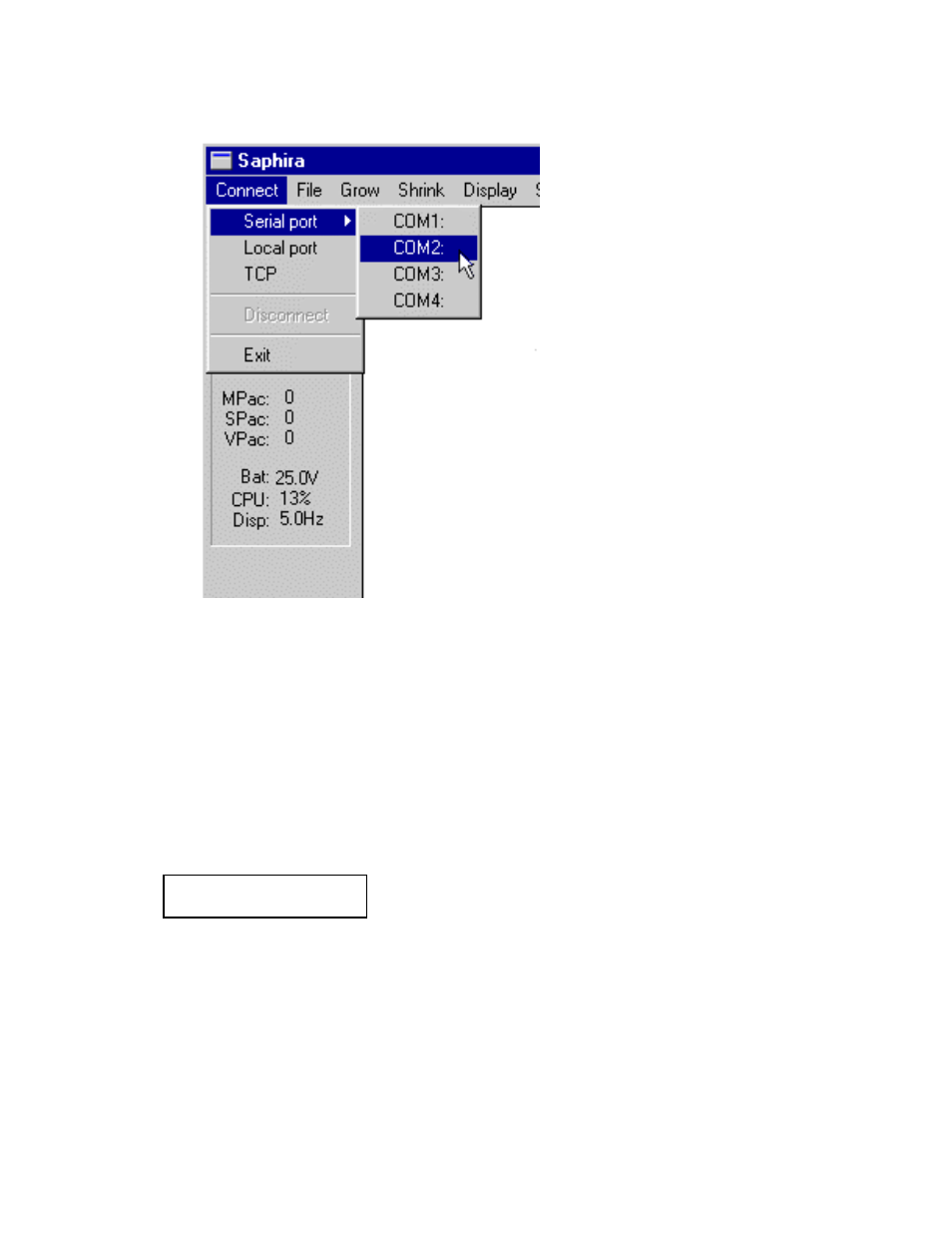
Figure 4-2. Connecting Saphira with Pioneer
A Successful Connection
After Saphira negotiates a connection successfully, the client requests various P2OS servers to initiate their
activities, including sonar polling, position integration, and so on. The microcontroller sounds an audible
connection cue, and you should hear the Pioneer’s sonar ping with a distinctive and repetitive clicking.
Press the white MOTORS pushbutton to enable the drive motors. The associated green LED should stop
flashing and light continuously.
The amber SERIAL port indicator LEDs on the robot’s Console should blink to indicate Saphira
client/P2OS server communications. The Pioneer
LCD
also should display a message similar to the
following:
Connected
P2OS v1.8 13.2*
Operating the Saphira Demo Client
When communications between the Saphira client and the Pioneer server are established, the robot
becomes responsive and intelligent. For example, although it may drive toward an obstacle, Pioneer will
not crash (unless its obstacle-avoidance behaviors have been disabled) because it can detect and actively
avoids collisions.
Collision avoidance is just one of the many mobile robot behaviors available through Pioneer's suite of
robotics application-development software. Remember, this section is meant to familiarize you with
Pioneer. Please read the respective Pioneer software manuals for details.