3 connection of external equipment, Connection procedure, Navigation aid, video sounder connection – Furuno 1932 MARK-2 User Manual
Page 14: Heading sensor connection, Figure 2-9 data flow, Input/output data list
2-3
Connection procedure
1. Connect the power cable to the power
cable connector on the rear of the display
unit.
2. Connect the signal cable to connector DJ-
1 on the rear of the display unit.
3. Run a ground wire (local supply) between
the ground terminal on the rear of the dis-
play unit and the ship’s superstructure.
2.3 Connection of External
Equipment
Navigation aid, video sounder
connection
If your navigation aid can output data in IEC
61162 (NMEA 0183) format, your vessel’s
position in latitude and longitude, the range
and bearing to waypoint, speed and course
may be input to this radar, and be seen on
the screen.
Further if your video sounder can output
depth data in IEC61162 (NMEA 0183) format,
depth can be displayed on the radar screen.
You will need an NMEA cable. The following
cables are optionally available.
e
p
y
T
.
o
n
e
d
o
C
s
k
r
a
m
e
R
0
5
0
-
2
1
0
0
F
P
S
6
A
-
J
M
4
2
4
-
4
3
1
-
0
0
0
)
m
5
(
P
6
-
P
6
0
0
1
-
2
1
0
0
F
P
S
6
A
-
J
M
7
1
8
-
3
3
1
-
0
0
0
)
m
0
1
(
P
6
-
P
6
0
5
0
-
3
0
0
0
F
P
S
6
A
-
J
M
3
0
6
-
7
1
1
-
0
0
0
)
m
5
(
r
o
t
c
e
n
n
o
c
/
w
0
0
1
-
9
0
0
0
F
P
S
6
A
-
J
M
6
3
2
-
5
2
1
-
0
0
0
)
m
0
1
(
r
o
t
c
e
n
n
o
c
/
w
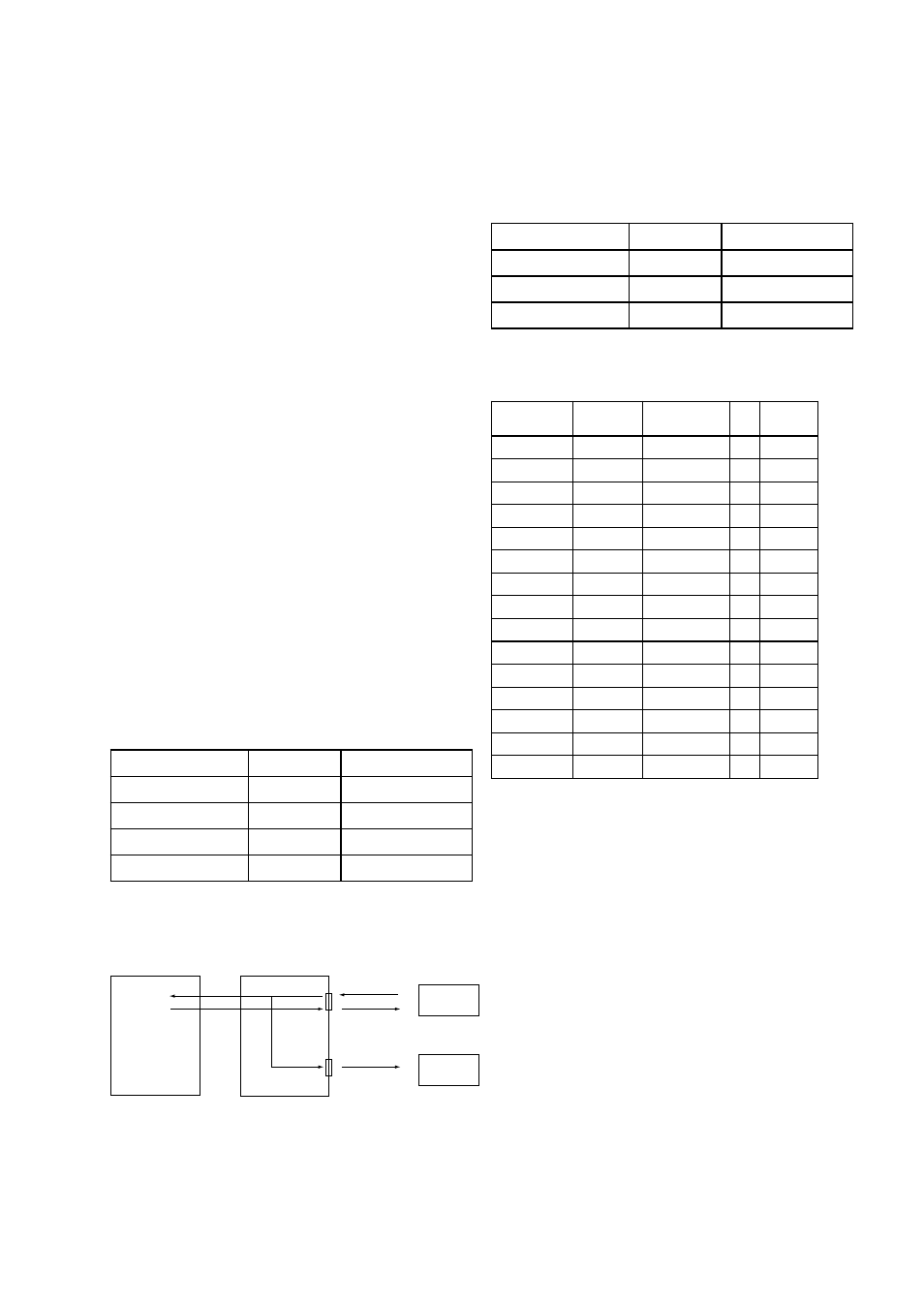
This radar can output NAV data received from
a navaid to an echosounder.
SPU9211
INT9213
1932 MARK2/42 MARK2
Navaid
Echo-
sounder
J1354
J1352 (NMEA)
(TLL)
Figure 2-9 Data flow
Heading sensor connection
Heading signal can be connected to the
“HDG” connector. You will need a heading
sensor cable. The following cables are op-
tionally available.
e
p
y
T
.
o
n
e
d
o
C
s
k
r
a
m
e
R
0
0
1
-
7
0
0
0
F
P
S
6
A
-
J
M
7
3
2
-
5
2
1
-
0
0
0
)
m
0
1
(
P
6
-
P
6
0
0
1
-
9
0
0
0
F
P
S
6
A
-
J
M
6
3
2
-
5
2
1
-
0
0
0
)
m
0
1
(
r
o
t
c
e
n
n
o
c
/
w
0
5
0
-
3
0
0
0
F
P
S
6
A
-
J
M
3
0
6
-
7
1
1
-
0
0
0
)
m
5
(
r
o
t
c
e
n
n
o
c
/
w
Input/Output Data List
l
e
d
o
M
r
o
t
c
e
n
n
o
C
e
m
a
N
a
t
a
D
n
i
P
t
u
O
/
n
I
2
M
1
6
5
V
C
F
1
J
)
5
.
1
(
3
8
1
4
t
u
O
/
n
I
L
1
8
5
V
C
F
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
L
2
8
5
V
C
F
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
1
9
2
V
C
F
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
2
9
2
V
C
F
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
8
6
6
V
C
F
A
E
M
N
)
5
.
1
(
3
8
1
4
t
u
O
/
n
I
L
0
0
6
V
C
F
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
0
1
8
1
P
G
T
U
O
/
N
I
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
2
M
0
0
1
3
P
G
T
U
O
/
N
I
)
5
.
1
(
3
8
1
6
t
u
O
/
n
I
2
M
0
0
0
8
P
G
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
4
t
u
O
/
n
I
2
M
0
0
0
8
S
P
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
4
t
u
O
/
n
I
0
8
P
G
1
A
T
A
D
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
0
8
P
G
2
A
T
A
D
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
C
0
1
6
1
P
G
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
F
C
0
1
6
1
P
G
A
E
M
N
)
0
.
2
/
5
.
1
(
3
8
1
6
t
u
O
/
n
I
Note: All plotters listed in the table above can
receive TLL data (radar target position).