Position fix interval – Linx Technologies RXM-GPS-FM User Manual
Page 15
– –
– –
24
25
Position Fix Interval
This configures the position fix interval. This is the time between when the
module calculates its position. This is the same as write message 220.
Ival = the interval time in milliseconds.
The interval must be larger than 100ms. Faster rates require that the baud
rate be increased, the number of messages that are output be decreased
or both. The module automatically calculates the required data bandwidth
and returns an action failed response (Flg = 2) if the interval is faster than
the module can output all of the required messages at the current baud
rate.
The following example sets the interval to 1 second.
$PMTK300,1000,0,0,0,0*1C
The following example reads the current position fix interval and the module
responds with an interval time of 1 second (1,000ms)
$PMTK400*36
$PMTK500,1000,0,0,0,0*1A
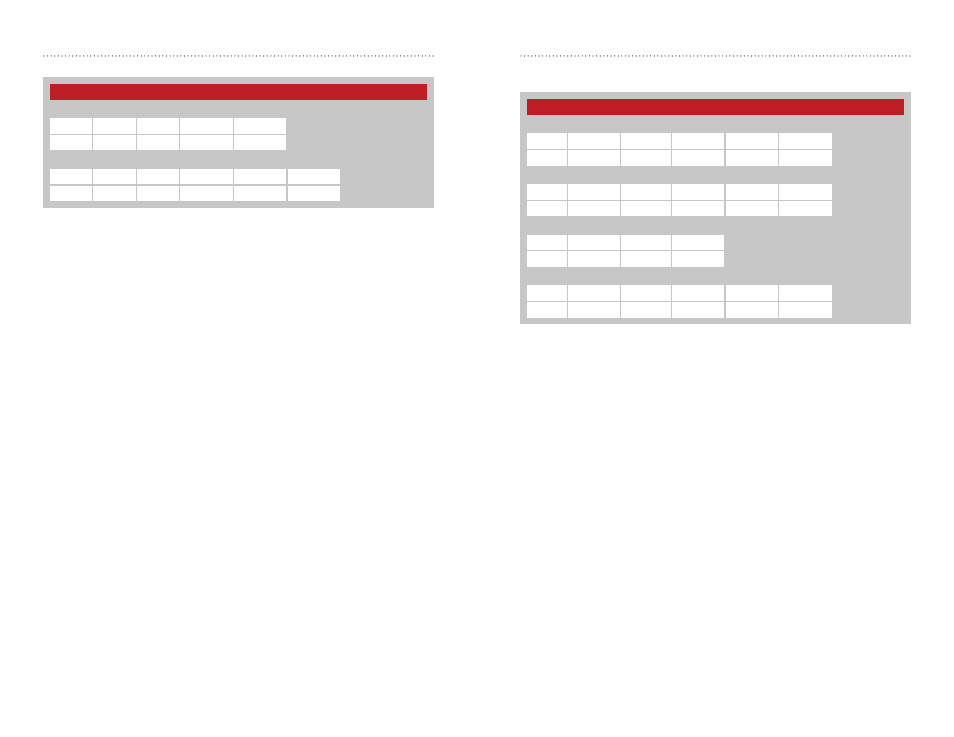
Position Fix Interval Command and Response
Write Message
Start
Msg ID
Interval
Data
Checksum
End
$PMTK
300
,Ival
,0,0,0,0
*Cksum
Acknowledge Response Message
Start
Msg ID
CMD
Flag
Checksum
End
$PMTK
001
,300
,Flg
*Cksum
Read Message
Start
Msg ID
Checksum
End
$PMTK
400
*36
Response Message
Start
Msg ID
Interval
Data
Checksum
End
$PMTK
500
,Ival
,0,0,0,0
*Cksum
Figure 28: Position Fix Interval Command and Response
251 – Baud Rate
This command sets the serial port baud rate.
Rate = serial port baud rate
0 = default setting (9,600bps)
4800
9600
14400
19200
38400
57600
115200
The following example sets the baud rate to 57,600bps.
$PMTK251,57600*2C
Serial Port Baud Rate Command and Response
Command
Start
Msg ID
Rate
Checksum
End
$PMTK
251
,Rate
*Cksum
Response
Start
Msg ID
CMD
Flag
Checksum
End
$PMTK
001
,251
,Flg
*Cksum
Figure 27: Serial Port Baud Rate Command and Response