Switching the scan frequency per cycle (s1-03) – Yaskawa AC Drive - A1000 Option Hz High Frequency Custom User Manual
Page 15
6 Application Notes
YASKAWA TM.A1000SW.056 YASKAWA AC Drive - A1000 Custom Software Supplement
15
The C6-05 setting range is 7 ~ 99, however a setting lower than 7 disables the ramp function and C6-03 is used across
the output frequency range. For motors with output frequencies greater than 500 Hz, use C6-05 = 7.
• Solve for corner output frequencies A and B
A Hz = [1000 Hz / (2 x C6-05)]
B Hz = [7000 Hz / (2 x C6-05)]
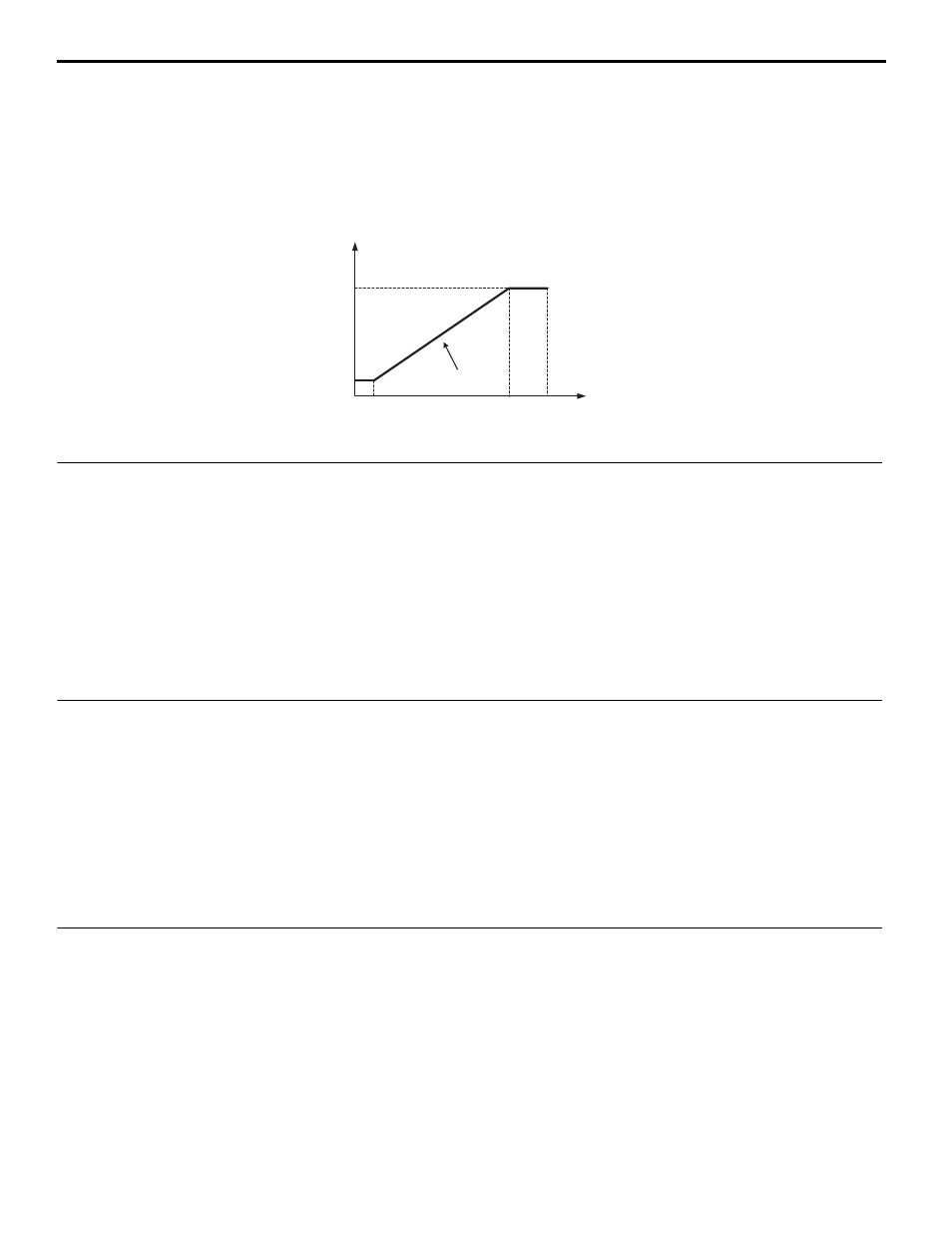
Figure 4
Figure 4 Carrier Frequency
Precautions for High Frequency/Low Impedance Motors
High frequency motors exhibit different characteristics than standard 60/120 Hz maximum frequency motors. The low
impedance associated with these high frequency motors often requires manually programming a custom V/f pattern into
the E1 parameter group to obtain proper performance and rated power from the drive-motor combination.
The low impedance may also cause excessive motor current. In addition to considering the use of an output reactor, it may
be advantageous to oversize the drive to accommodate the high peak current that may result from the low impedance
motor. Using a drive that is at least one or two models larger than the motor FLA may also help eliminate the oL2 faults.
Compatibility between the drive, motor, and the reactor is best accomplished via testing and observation of the motor
current waveform with an oscilloscope.
Refer to Using an Output Reactor on page 14
.
Precautions for Auto-Tuning Open Loop vector for PM motors
For SPM motors with a small difference in d-axis inductance (E5-06) and q-axis (E5-07) inductance, parameter S1-02
should be disabled* (S1-02 = 0, default = 1) prior to performing Auto-Tuning. In motors where there is some difference in
d-axis inductance (E5-06) and q-axis inductance (E5-07), reduce the setting of n8-84 prior to Auto-Tuning if there is a
relatively lower amount of motor armature resistance (E5-05).
* If S1-02 = 0 (disabled), the drive will use saliency during Auto-Tuning and not estimate motor polarity.
Note: Because a high frequency motor has a unique design, Auto-Tuning may not be sufficient for the drive to achieve
proper motor performance. Motor parameters (E5-XX) should be set manually accordingly the information on the motor
nameplate.
Switching the Scan Frequency per Cycle (S1-03)
Normally there is no need to change S1-03 from the default setting.I f there is a problem with output voltage weakening
when attempting to compensate for output current distortion as the motor reaches 1000 Hz, with the load decoupled from
the motor, then try setting S1-03 = 1. If this fails to solve the problem, then install an AC reactor designed specifically for
AC drive high frequency applications.
C6-03 =
7.0 kHz
A Hz
Carrier
Frequency
(Fc)
Output
Frequency
(Fout)
B Hz
Parameter C6-02 = F
C6-04 =
1.0 kHz
E1-04
Fc = 2 x C6-05 x Fout