Laser control, Applications, How it works – Liebherr PR 724 Litronic User Manual
Page 3: Useful information, Components
PI_PR724-764_enUS.INDD 3
18.12.2009 13:24:24 Uhr
Laser control
Applications
Creation of horizontal or sloped grades with high accuracy
•
Suitable for small to medium sized construction sites
•
Application for construction of sports fi elds, storage or dump sites, road construction,
•
housing and residential areas, etc.
How it works
The rotary laser rotates at high speed and in doing so generates a reference plane out of laser light. This plane can be
horizontal or sloped, but it is always planar (two dimensional).
The laser receivers are installed on masts on the blade of the crawler tractor. They catch the emitted laser beam and
determine the current elevation of the dozer blade in relation to the reference height. For applications with lower ac-
curacy requirements, a single laser receiver is suffi cient to determine the elevation of the blade (single laser). Normally,
two masts or one mast and a slope sensor are installed, this “dual operation” allows both the blade elevation as well
as tilt to be determined).
The control unit processes the signals from the laser receivers and the slope sensor and constantly regulates the
elevation and tilt of the blade automatically via the working hydraulics.
When working in automatic mode, the operator only needs to steer the tractor, while the grade control automatically
regulates the movements of the blade, creating a grade parallel to the laser surface.
Useful information
Visual contact between the rotary laser and the crawler is required
•
Simple and comparatively inexpensive system, however no 3D contours can be created
•
Several machines can work in the same grading level with a single rotation laser
•
Height accuracy < 1 cm
•
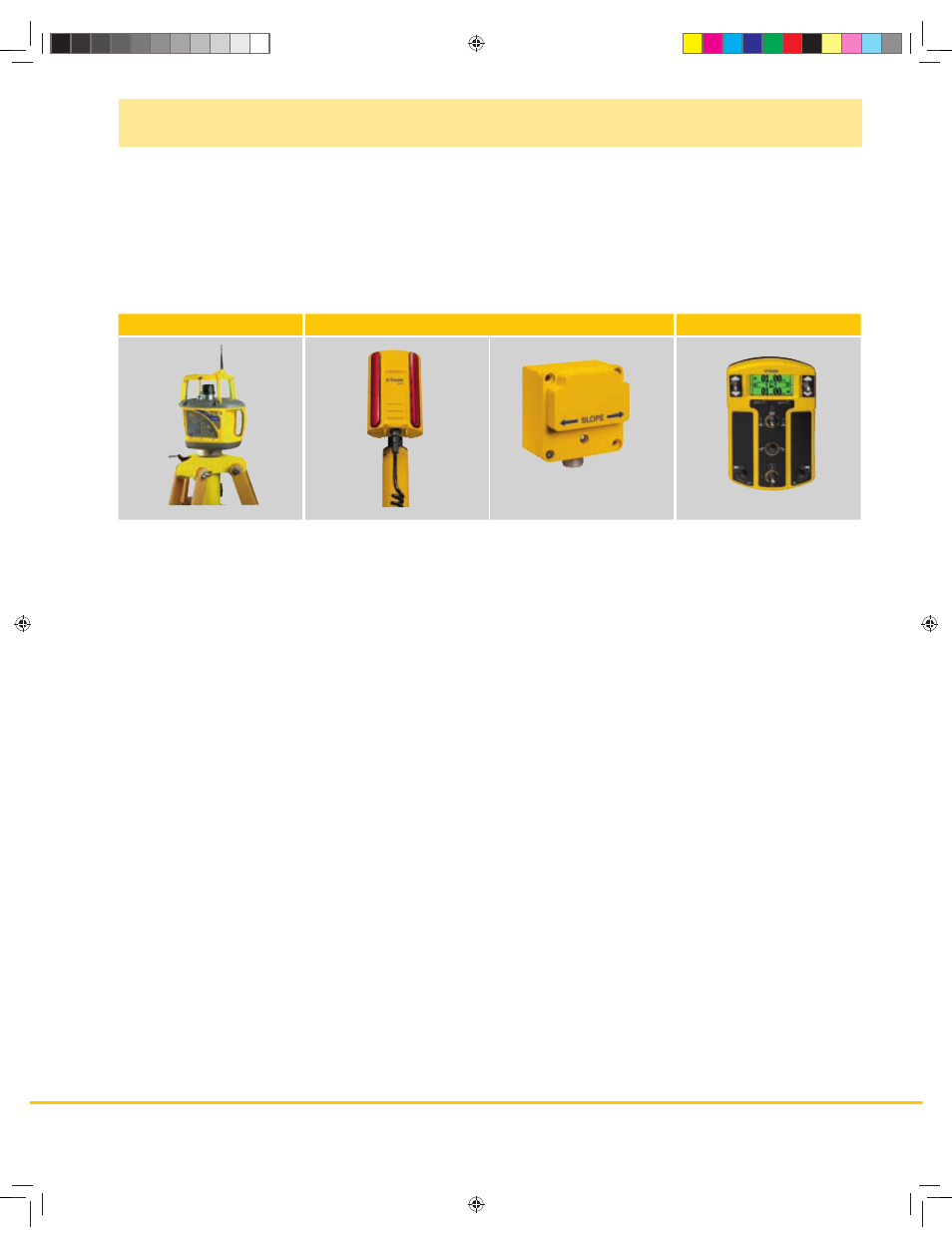
Components
In terrain
On the dozer blade
In the cab
Rotary laser
1 or 2 laser receivers
Option:
Cross slope sensor
Control unit
Symbol images only
3
Grade control systems
PI_PR724-764_enUS.INDD 3
PI_PR724-764_enUS.INDD 3
18.12.2009 13:06:56 Uhr
18.12.2009 13:06:56 Uhr