Liebherr robot system for bin picking, Process description, Requirement – Liebherr Bin Picking User Manual
Page 2: Visual data acquisition and analysis
Flexible Robot Systems
2
Process Description
Unloading the work piece out of dunnage is a complex interaction between a vision system, software and robot. According
to the part spectrum all process-relevant steps need to be synchronized to reach an optimum grip and positioning result.
Requirement
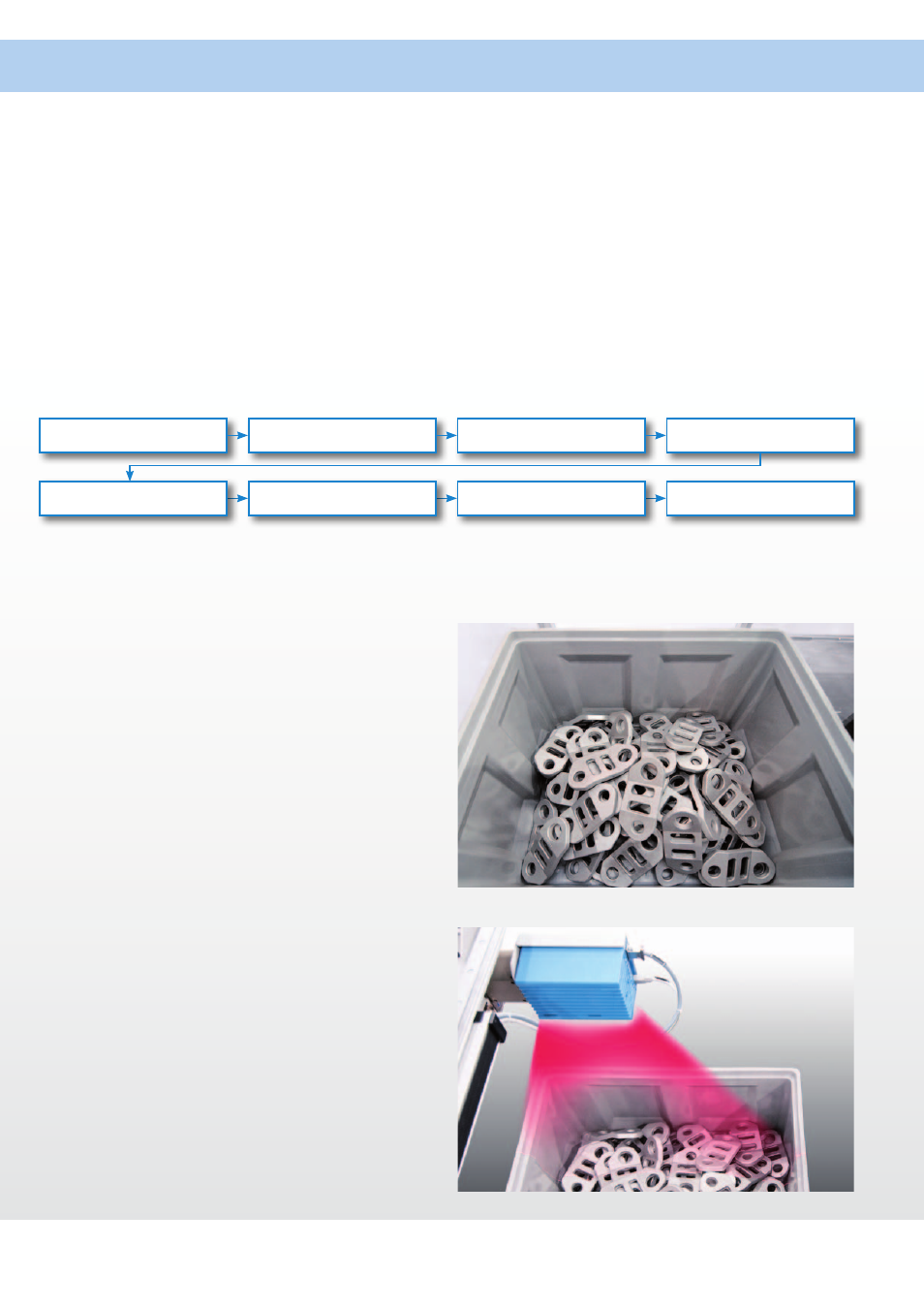
Randomly arranged parts should be
removed from a transport container.
Visual Data Acquisition
and Analysis
A reliable and dynamic 3D object recognition
system visually acquires and analyzes the data.
Bin picking is one of the most challenging industry auto-
mation applications. The foundation of this system is the
automatic unload of randomly arranged work pieces out of
dunnage. To date there are very few robot designs that meet
both the sturdiness and cycle time requirements. Liebherr
offers flexible robot systems with which bin picking can be
Visual Data Acquisition
Robot Path Planning
Data Analysis
Collision Detection
Object Identification
Object Removal
Object Selection
Object Positioning
Liebherr Robot System for Bin Picking
economically automated. Liebherr has designed and created
robot systems that help automate manufacturing processes
to increase capacity thereby lowering costs. Many tasks can
be solved with the long established tried and tested work
piece handling components from the Liebherr automation
systems area.