Applications information – Rainbow Electronics MAX6628 User Manual
Page 6
MAX6627/MAX6628
Remote ±1°C Accurate Digital Temperature
Sensors with SPI-Compatible Serial Interface
6
_______________________________________________________________________________________
0°C. When power is first applied and V
CC
rises above
1.6V (typ), the device starts to convert, although tem-
perature reading is not recommended at V
CC
levels
below 3.0V.
Serial Interface
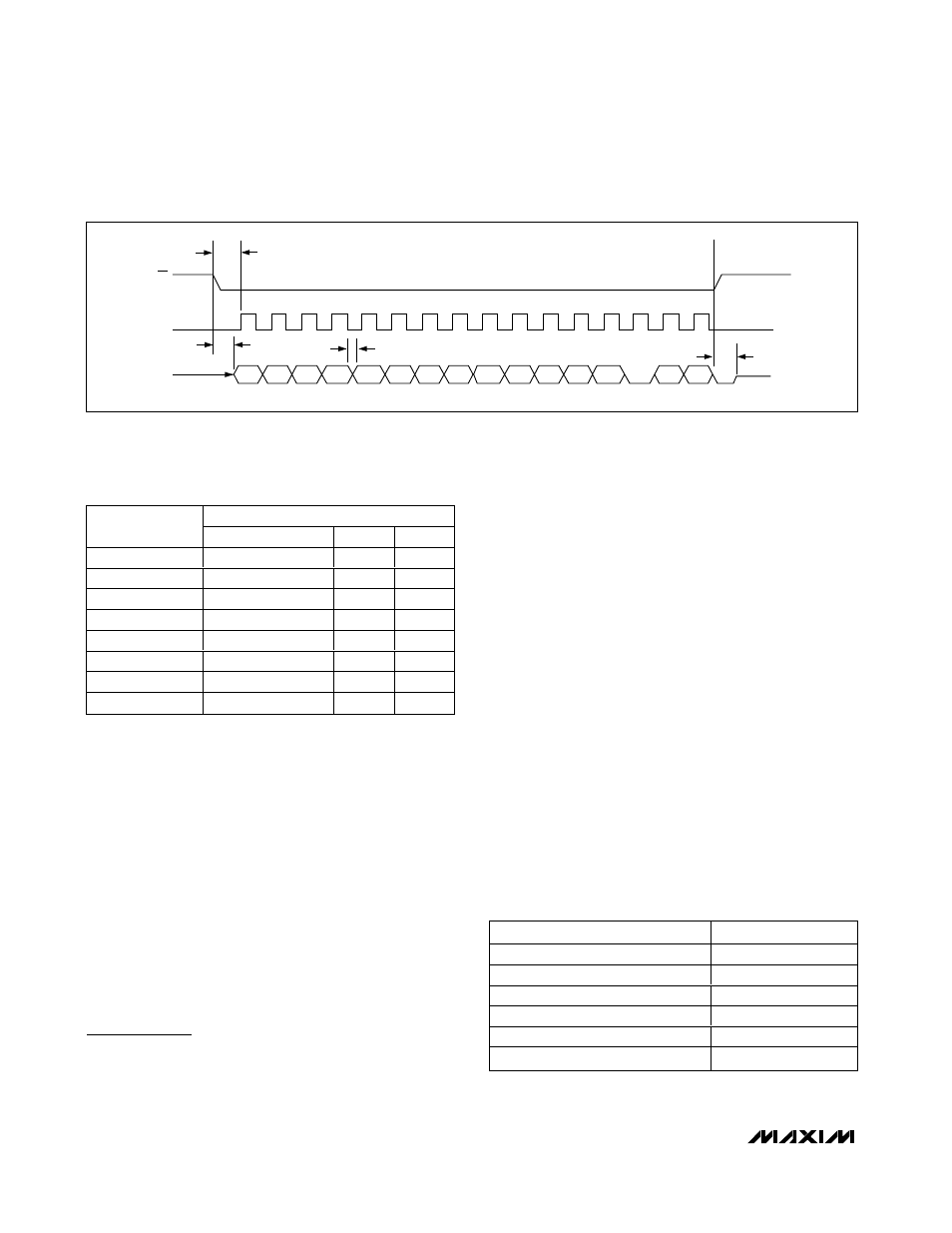
Figure 2 is the serial interface timing diagram. The data
is latched into the shift register on the falling edge of
the CS signal and then clocked out at the SO pin on the
falling edge of SCK with the most-significant bit (MSB)
first. There are 16 edges of data per frame. The last 2
bits, D0 and D1, are always in high-Z mode. The falling
edge of CS stops any conversion in progress, and the
rising edge of CS always starts a new conversion and
resets the interface. It is required to maintain a 320ms
minimum pulse width of high CS signal before a con-
version starts.
Applications Information
Remote-Diode Selection
Temperature accuracy depends upon having a good-
quality, diode-connected, small-signal transistor.
Accuracy has been experimentally verified for all of the
devices listed in Table 3. The MAX6627/MAX6628 can
also directly measure the die temperature of CPUs and
other ICs with on-board temperature-sensing diodes.
The transistor must be a small-signal type with a rela-
tively high forward voltage. This ensures that the input
voltage is within the A/D input voltage range. The for-
ward voltage must be greater than 0.25V at 10µA at the
highest expected temperature. The forward voltage
must be less than 0.95V at 100µA at the lowest expect-
ed temperature. The base resistance has to be less
than 100
Ω. Tight specification of forward-current gain
(+50 to +150, for example) indicates that the manufac-
turer has good process control and that the devices
have consistent characteristics.
ADC Noise Filtering
The integrating ADC has inherently good noise rejec-
tion, especially of low-frequency signals such as
60Hz/120Hz power-supply hum. Micropower operation
places constraints on high-frequency noise rejection.
Lay out the PC board carefully with proper external
noise filtering for high-accuracy remote measurements
in electrically noisy environments.
Figure 2. SPI Timing Diagram
D15
D0
D1
D2
D3
SCK
SO
t
DV
t
CSS
t
DO
CS
t
TR
Table 3. SOT23-Type Remote-Sensor
Transistor Manufacturers
MANUFACTURER
MODEL
Central Semiconductor (USA)
CMPT3904
Fairchild Semiconductor (USA)
MMBT3904
Motorola (USA)
MMBT3904
Rohm Semiconductor (Japan)
SST3904
Siemens (Germany)
SMBT3904
Zetex (England)
FMMT3904CT-ND
Note: Transistors must be diode connected (short the base to
the collector).
Table 2. Temperature Data Format
(Two’s Complement)
DIGITAL OUTPUT (BINARY)
TEMPERATURE
(
°C)
D15–D3
D2
D1, D0
150
0,1001,0110,0000
0
XX
125
0,0111,1101,0000
0
XX
25
0,0001,1001,0000
0
XX
0.0625
0,0000,0000,0001
0
XX
0
0,0000,0000,0000
0
XX
-0.0625
1,1111,1111,1111
0
XX
-25
1,1110,0111,0000
0
XX
-55
1,1100,1001,0000
0
XX