Rikaline, Appendix c developer’s setting, C.1 $pnmrx100, set serial port mode – Rikaline GPS-24/24A User Manual
Page 15: C.2 $pnmrx101, navigation initialization
GPS Receiver Board
GPS-24 / 24A Operating Manual
Rikaline
Specifications subject to change without prior notice
Rikaline
International Corp.
14F, 171, ChengGong Rd, Sanchong CityTaipei 241, Taiwan
Tel: ++886 2 8973 1899 Fax: ++886 2 8973 1896 E-Mail:
Web: www.rikaline.com.tw
Appendix C Developer’s Setting
For all $PNMRX messages, it is possible to configure an alternative string to replace the NMRX part,
the node always responds to the $PNMRX strings and can be configured to generate and respond to
the alternative string.
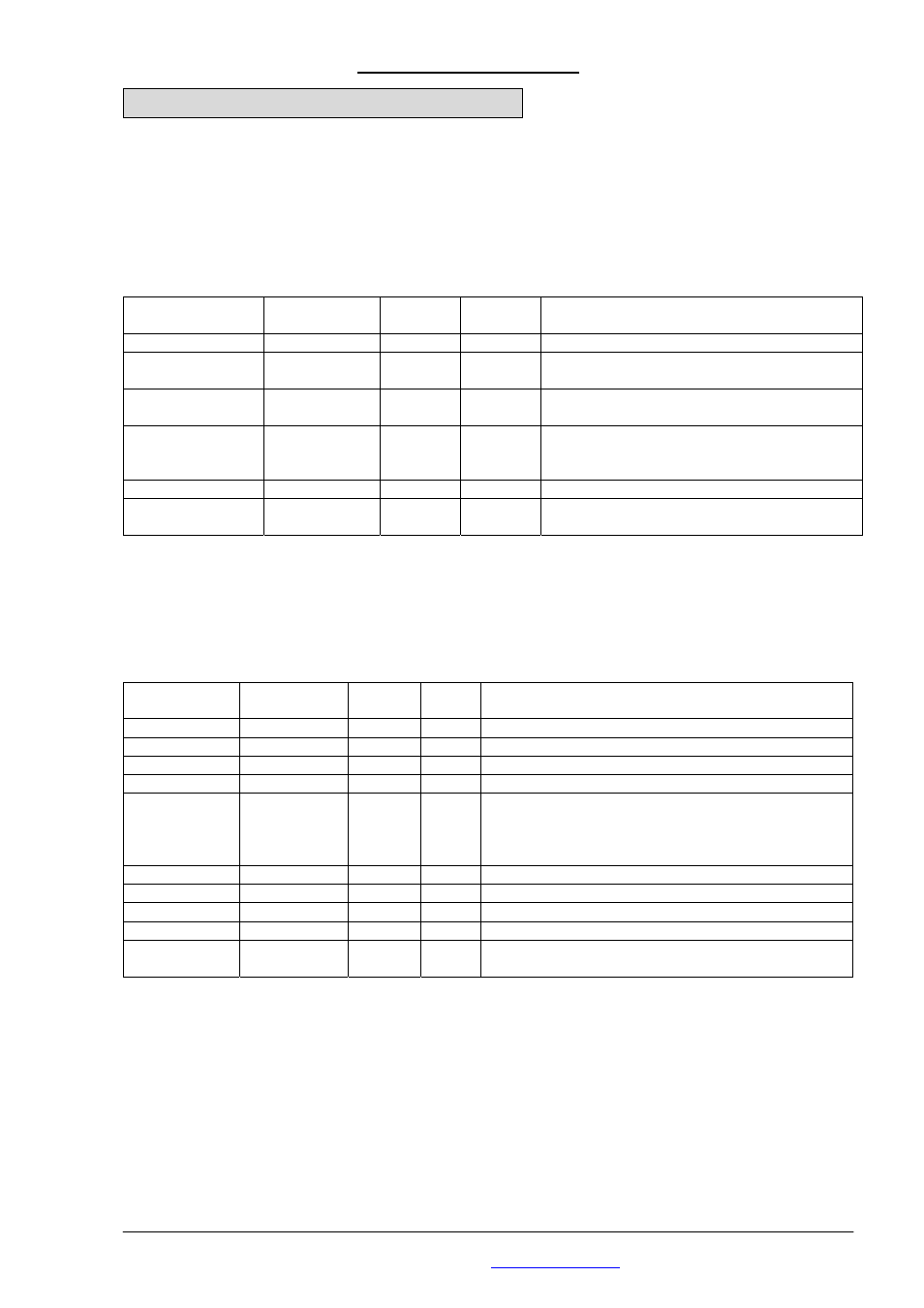
C.1 $PNMRX100, Set serial port mode
This message is sent to control the serial communications port parameters. The $PNMRX100
message format is shown below.
Field Format
Min
chars
Max
chars
Notes
Message ID
$PNMRX100
6
6
PNMRX100 protocol header.
Protocol Char
1
1
0
NMEA
mode
1 NemeriX Binary Mode (under dev)
Baud
Int
4
6
1200 / 2400 / 4800 / 9600 / 19200 / 38400 /
57600.
Parity Char 1
1
0.
None.
1. Odd.
2. Even.
Checksum
*xx
(0) 3
3
2 digits.
Message
terminator
2
2
ASCII 13, ASCII 10.
Examples:
$PNMRX100,0,4800,0*xx: sets the UART baud rate to 4800 bps and no parity.
C.2 $PNMRX101, Navigation Initialization
This message is sent to initialize navigation parameters to speed up initial acquisition time. The
$PNMRX101 message format is shown below.
Field Format
Min
chars
Max
chars
Notes
Message ID
$PNMRX101 6
8
PNMRX101 protocol header.
ECEF_X
Int
(-)7
(-)7
Signed ECEF x co-ordinate in meters
ECEF_Y
Int
(-)7
(-)7
Signed ECEF y co-ordinate in meters
ECEF_Z
Int
(-)7
(-)7
Signed ECEF z co-ordinate in meters
Clock offset
Int
(0) 1
6
Clock offset of GPS receiver, in [Hz x 100] wrt L1.
This changes the clock bias stored in the settings
not the actual clock bias used by the system. A cold
start is necessary, in order to use this value.
Time of week
Int
1
6
Offset from start of week in seconds
Week number Int
1
4
GPS week number
Channel count Int
1
2
Maximum number of TM to be used. Min 12, max 16.
Checksum
*xx
(0) 3
3
2 digits.
Message
terminator
2
2
ASCII 13, ASCII 10.
Note: 1// If used, all three X,Y, and Z components of the ECEF position must be provided, otherwise the
message is declared invalid as a whole
2// Modifying the ECEF coordinates triggers a software system reset after successful execution of the
message
Examples:
$PNMRX101,,,,,,,,8,*xx:
Executes a factory reset
$PNMRX101,-742507,-5462738, 3196706,*xx: Sets the receiver position to ECEF (,) and executes a
software reset
$PNMRX101, 4,*xx:
Sets the fix procedure mode the cold start. This will be
valid after each reset, until this value is changed.