Additional commands – Nexstar SynScan User Manual
Page 21
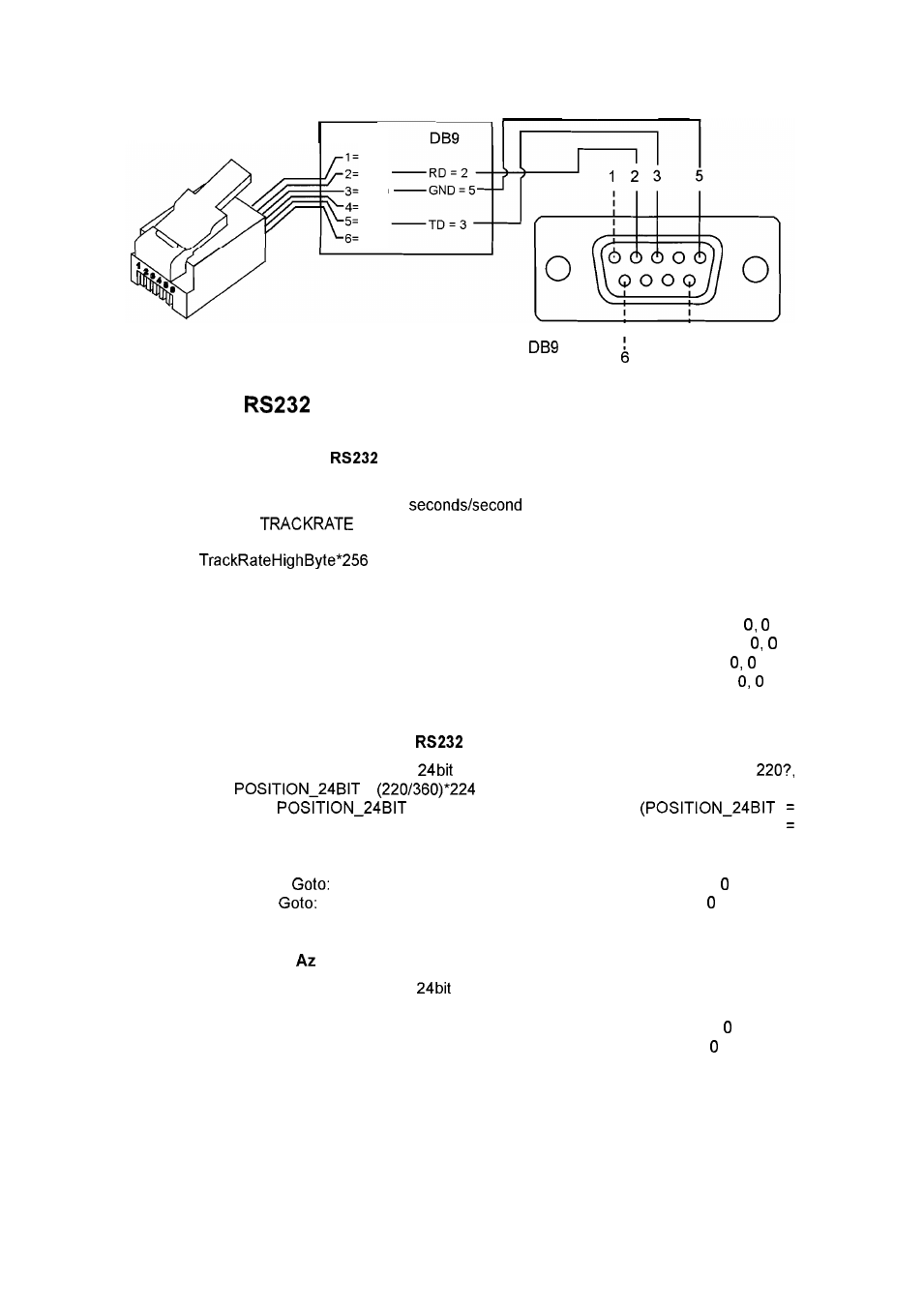
Physical Connection Diagram
RJ-11 Connector
RJ-11
N
C
RD
GND
N
C
TD
N
C
I
I
I
The Back of the
Pinout
9
Additional
Commands
Sending a track rate through
to the hand control
1. Multiply the desired tracking rate (arc seconds /second) by 4. For example: if the
desired track rate is 120 arc
(proximately
8
times of sidereal rate),
then the
= 480.
2. Separate
TRACKRATE
into
two
bytes,
such
that
(TRACKRATE
=
+ TrackRateLowByte). For example TRACKRATE
= 480,
then TrackRateHighByte
=
1, TrackRateLowByte
= 224.
To send a tracking rate, send the following 8 bytes:
a. Positive Azm tracking: 80, 3, 16, 6, TrackRateHighByte, TrackRateLowByte,
b. Negative Azm tracking: 80, 3, 16, 7, TrackRateHighByte, TrackRateLowByte,
c. Positive Alt tracking: 80, 3, 17, 6, TrackRateHighByte, TrackRateLowByte,
d. Negative Alt tracking: 80, 3, 17, 7, TrackRateHighByte, TrackRateLowByte,
4. The number 35 is returned from the hand control.
Sending a slow-Goto command through
to the hand control
1. Convert the angle position to a
number. Example: if the desired position is
then
=
= 10,252,743
2. Separate
into three bytes such that
PosHighByte
* 65536 + PosMedByte
*
256 + PosLowByte). Example: PosHighByte
156, PosMedByte
= 11 3, PosLowByte = 199
3. Send the following 8 bytes:
a. Azm Slow
80, 4, 16, 23, PosHighByte, PosMedByte, PosLowByte,
b. Alt Slow
80,
4,
17, 23, PosHighByte, PosMedByte, PosLowByte,
4. The number 35 is returned from the hand control.
Reseting the position of
or Alt
1. Convert the angle position to a
number, same as Slow-Goto example.\
2. Send the following 8 bytes:
a. Azm Set Position: 80, 4, 16, 4, PosHighByte, PosMedByte, PosLowByte,
b. Alt Set Position: 80, 4, 17, 4, PosHighByte, PosMedByte, PosLowByte,
3. The number 35 is returned from the hand control.
3.