Standalone operation, Drive and motor protection – NEC EU1V0UM00 User Manual
Page 10
Motor Control I/O Board User’s Manual
To control the motor from a GUI on your PC, connect a serial cable to the J9 RS-232 port on the
MC-IO board and rebuild the code with the GUI macro option as described later in this manual.
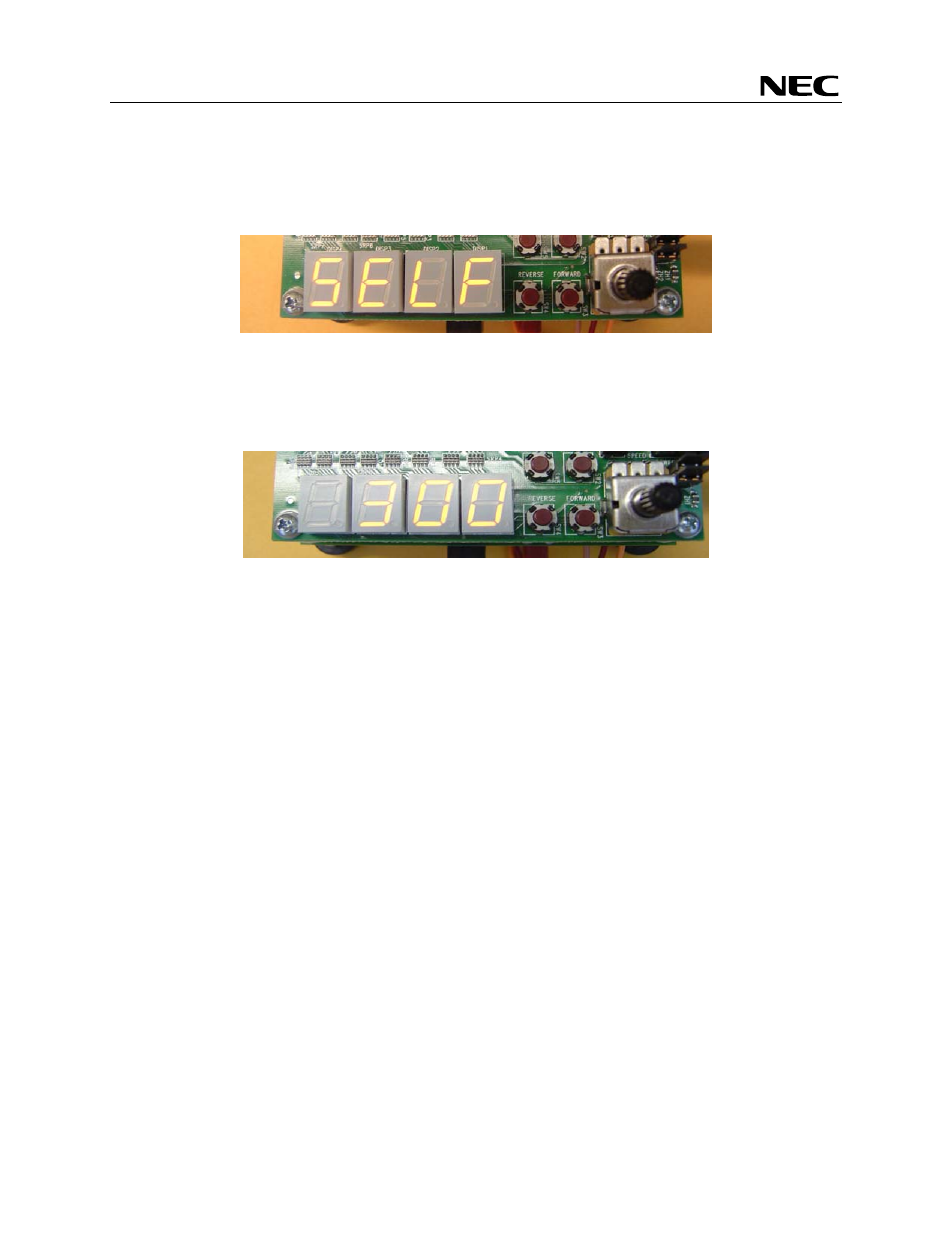
Figure 5. Standalone Operation
Three seconds after power up, the LED displays the current set speed.
Figure 6. Speed Display
4. Standalone Operation
After power up in standalone mode, the motor can be operated as follows:
1. Press
the
START/STOP button to run the motor.
2. Turn the potentiometer clockwise to accelerate or counterclockwise to decelerate.
3. Wait for the LED to display the actual motor speed calculated from the Hall sensor interrupts.
4. Press
the
FORWARD or REVERSE button to change the rotation direction.
5. Press
the
MODE button to display the set speed.
6. Press
START/STOP to stop the motor.
Note: If the potentiometer position is set to higher speeds, and the motor rotation is suddenly
reversed, an error condition may occur due to a timeout or over-current detection and the motor will
stop operating. To reboot, press the RESET switch on the MC-IO board, adjust the potentiometer to
a lower speed and restart.
5. Drive and Motor Protection
The starter kit and the motor are protected against unexpected events such as overload, motor stall
and malfunction of the Hall sensors. If such faults are detected, the motor stops rotating and the fault
4