Page - 10 – Kaidan TM-400 User Manual
Page 10
Page - 10
The eMCee software controls Kaidan hardware via a serial interface and in
order for eMCee to function properly it must be able to gain solitary control
of the serial port being used. System Extensions that monitor the serial ports
for activity will deny eMCee solitary control of the serial port. Extensions like
3rd party print drivers or Palm Pilot’s Hot Sync that are constantly running,
will prevent eMCee accessing the serial port.
For Macintosh users: Under the Apple Menu, go to Control Panels - Exten-
sions Manger. In the Extensions Manager, deselect the extensions that you
want to disable. Restart your computer. If you are not sure of what exten-
sions may be causing this problem, follow these directions. Go to the Apple
Menu and select the Apple System Profiler. Create a new report,check off all
boxes in the dialog window and email the report to [email protected].
For PC users: Uninstall the extensions that may be conflicting with
eMCee.and restart your computer. If you are still experiencing problems please
get a profile of your system & drivers, and email it to [email protected].
E
MC
EE
IS
WORKING
,
BUT
IT
APPEARS
THAT
THE
TURNTABLE
/
RIG
IS
NOT
MOVING
TO
THE
RIGHT
POSITION
?
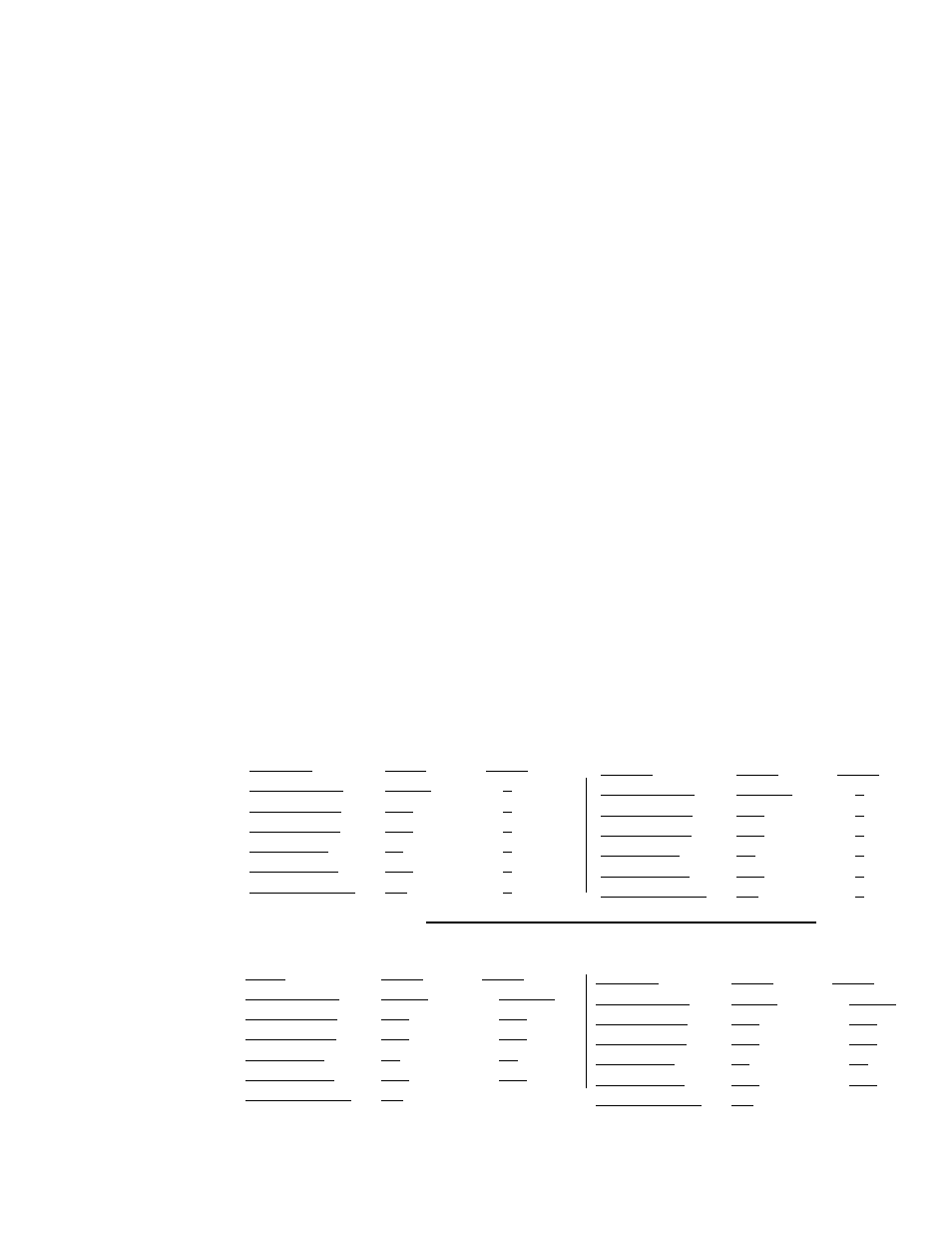
If the motors are running under eMCee control but they appear not to be
positioning properly, you may need to check the preferences of the eMCee
software. eMCee ships with all Kaidan motorized products and there are dif-
ferent preference settings for each Kaidan model. The preferences for eMCee
can be set by running the appropriate default setting script for your paticular
Kaidan product. The default setting scripts are located in the “Scripts” folder
of your eMCee software package. You can also enter the preferences directly
through eMCee’s preferences panel, see chart below for values.
T M - 4 0 0
T M - 4 0 0
T M - 4 0 0
T M - 4 0 0
T M - 4 0 0
X-Axis
Y-Axis
Steps per Rev
20000
0
Intial Velocity
100
0
Slew Velocity
500
0
Ramp Slope
10
0
Move Speeds
500
0
Step Resolution
Full
0
M T - 8 4
M T - 8 4
M T - 8 4
M T - 8 4
M T - 8 4
X-Axis
Y-Axis
Steps per Rev
126033
0
Intial Velocity
250
0
Slew Velocity
300
0
Ramp Slope
20
0
Move Speeds
300
0
Step Resolution
Full
0
M - 1 5 0 1
M - 1 5 0 1
M - 1 5 0 1
M - 1 5 0 1
M - 1 5 0 1
X-Axis
Y-Axis
Steps per Rev
12000
20000
Intial Velocity
100
100
Slew Velocity
500
300
Ramp Slope
10
10
Move Speeds
500
300
Step Resolution
Full
C - 6 0
C - 6 0
C - 6 0
C - 6 0
C - 6 0
X-Axis
Y-Axis
Steps per Rev
20000
374810
Intial Velocity
100
100
Slew Velocity
500
700
Ramp Slope
15
15
Move Speeds
500
700
Step Resolution
Full