Motors & propellers – 3D Robotics DIY Quad Kit User Manual
Page 11
10
MOTORS & PROPELLERS
COUNTERCLOCKWISE ROTATION:
USE PULLER PROPELLER
CLOCKWISE ROTATION:
USE PUSHER PROPELLER
Your copter includes puller propellers (unmarked or marked “SF”) and pusher propellers
(marked “SFP” or “P“). The direction of each motor is shown above: add pusher propellers
to motors marked clockwise, add puller propellers to motors marked counterclockwise.
CCW
!
!
CW
CCW
!
!
CW
CCW
!
!
CW
CCW
!
!
CW
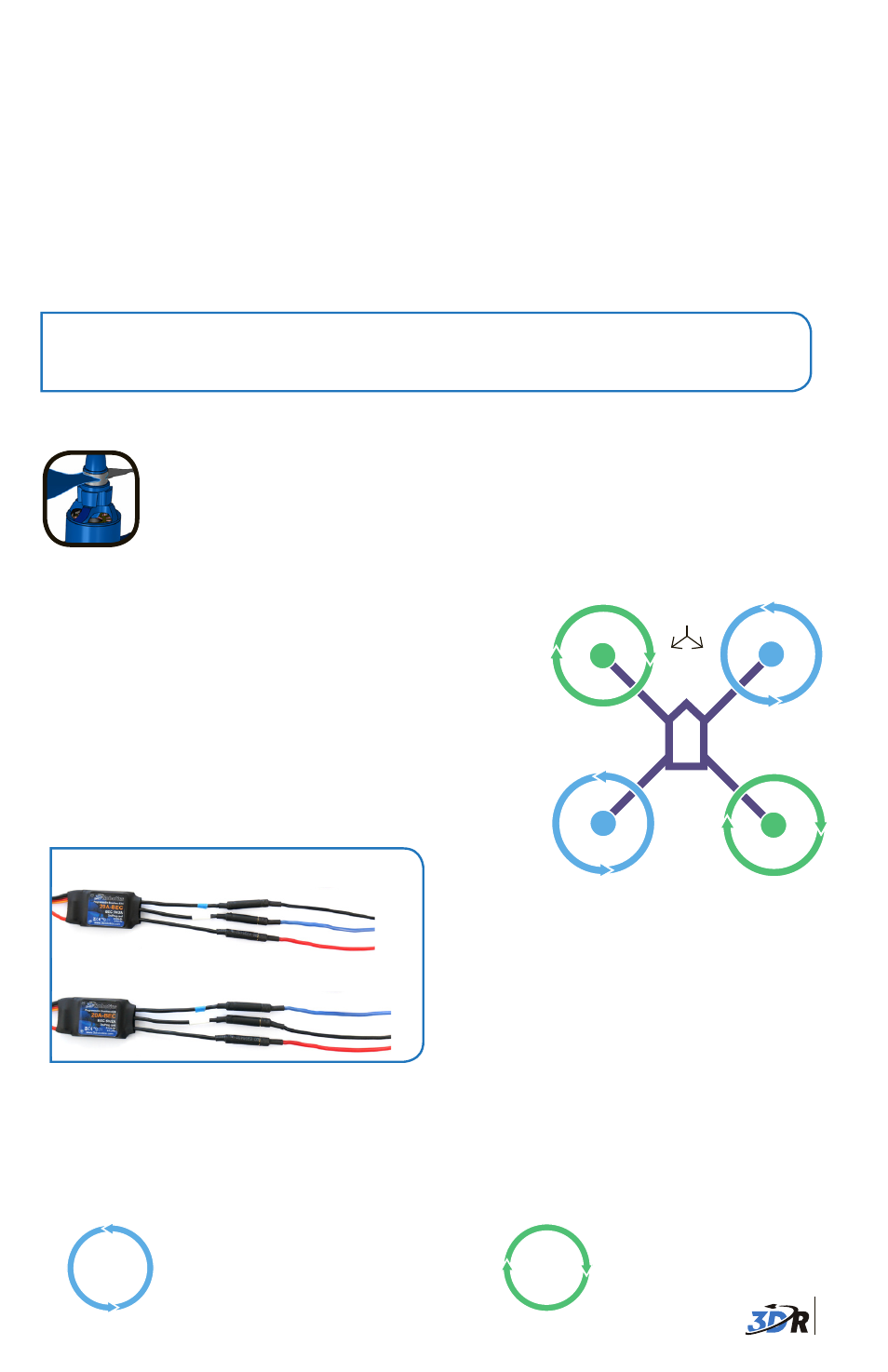
The diagram across shows the correct rotation
directions for your Quad’s four motors: motors one
and two should rotate counterclockwise, motors three
and four should rotate clockwise.
The rotation direction for each motor is determined by
the connections between the motor and the ESC. To
reverse the rotation direction for a motor, switch two
of the three wires connecting the motor and the ESC.
APM
2
CCW
1
CCW
3
CW
4
CW
APM
1
CCW
2
CCW
4
CW
3
CW
APM
5
CCW
4
CCW
2
CCW
6
CW
1
CW
3
CW
APM
5
CCW
2
CCW
4
CCW
3
CW
6
CW
1
CW
Quad motor order
Blue arms
1. Connection between motor and ESC
2. Switch two wires to reverse motor rotation.
puller
pusher
puller
pusher
Flight Modes
: Move each switch on your transmitter to its available positions. Mission Plan-
ner will indicate the currently selected position with green highlighting. Select a mode for
each switch position, and select
Saves Modes
to assign.
Failsafes
: Failsafes are advanced safety precautions that can be very useful for your copter.
Consult the online documentation at
copter.ardupilot.com
to learn more about configuring
and testing failsafes.
Complete all configuration procedures as described at
copter.ardupilot.com
before attempting your first flight.
Show me! Watch videos demonstrating live calibration techniques at 3DRobotics.com/learn.