Sunrise Medical Ruby User Manual
Page 24
930705 Rev. B
24
E n g l i s h
X . O p e r a t i n g G u i d e
X. OPERATING GUIDE
A. PERFORMANCE CONTROL SETTINGS
1. It is vital to match control settings to your level of function and ability.
2. Consult your health care professional and your supplier to select the best control set-
tings for you.
3. Check and adjust the settings every six to twelve months (or more often, if needed).
4. Adjust the control settings immediately if you notice any change in
your ability to:
•Control the joystick.
•Hold your torso erect.
•Avoid running into objects.
5. Control Settings are adjusted through the use of the Quickie QTRONIX Programming
Pad. See your supplier if you do not own a Quickie QTRONIX Programming Pad.
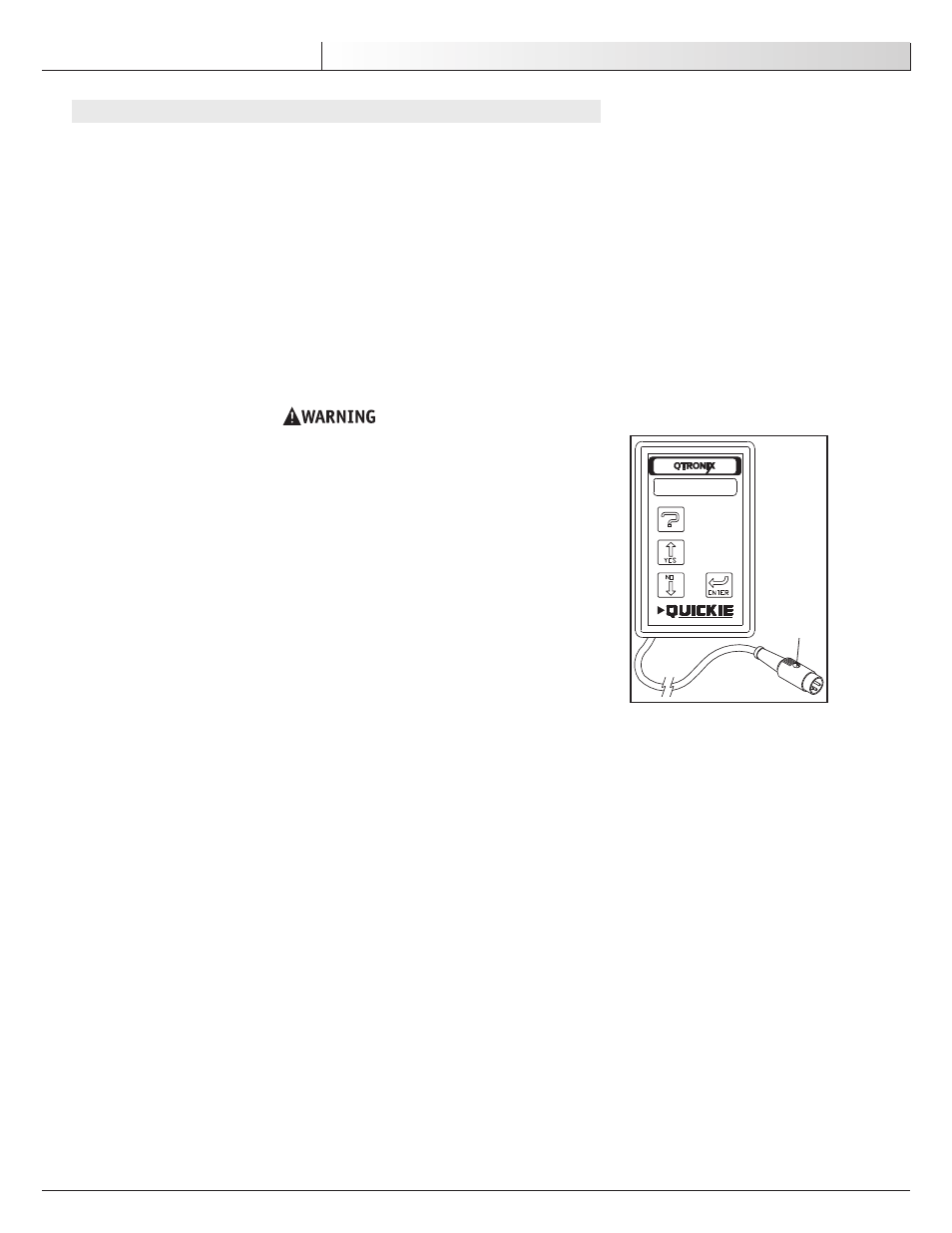
B. QUICKIE QTRONIX PROGRAMMER PAD (Ruby/Ruby 11 only) (OPTIONAL)
Program settings beyond the ability of the rider can result in serious injury.
Consult your health care advisor before you alter settings.
1. Notes:
The Quickie QTRONIX Programmer lets you adjust the performance control settings of the
Aspire. You can customize a program for yourself or select the standard program.
•
acceleration rate
•
deceleration rate
•
turn acceleration
•
turn deceleration
•
forward speed (max & min)
•
reverse speed (max & min)
•
turn speed (max & min)
•
steer correct
Remote systems
•
4-axis joystick throw
•
sleep timer
•
profile number
•
read timer
2. To Program Your Chair:
a. Turn off power to the chair.
b. Insert Quickie QTRONIX Programmer plug (A) into the programmer/charger socket on
the front of the joystick.
c. Turn on power to the chair; program as needed.
d. Remove plug and cycle ON/OFF switch to drive chair.
NOTE– Review the Quickie QTRONIX Programmer Owner’s Manual for more details on how to program
your chair.
NOTE– Program settings that are not matched for the capabilities of the rider can result in serious
injury. Do not alter settings without the advice of your health care professional.
C. THERMAL ROLL-BACK
Your chair has a thermal roll back circuit. This protects the controller from damage due to
overheating. In extreme conditions (such as repetitive hill climbing) the circuit will
decrease the power to your motors. This allows the chair to operate at a reduced speed.
When the controller cools, the chair will return to normal speed.
A