Function library – Lenze 8200 motec frequency inverter 0.25kW-7.5kW User Manual
Page 82
Function library
Selection of control mode, optimisation of operating behaviour
7−11
L
EDB82MV752 EN 5.2
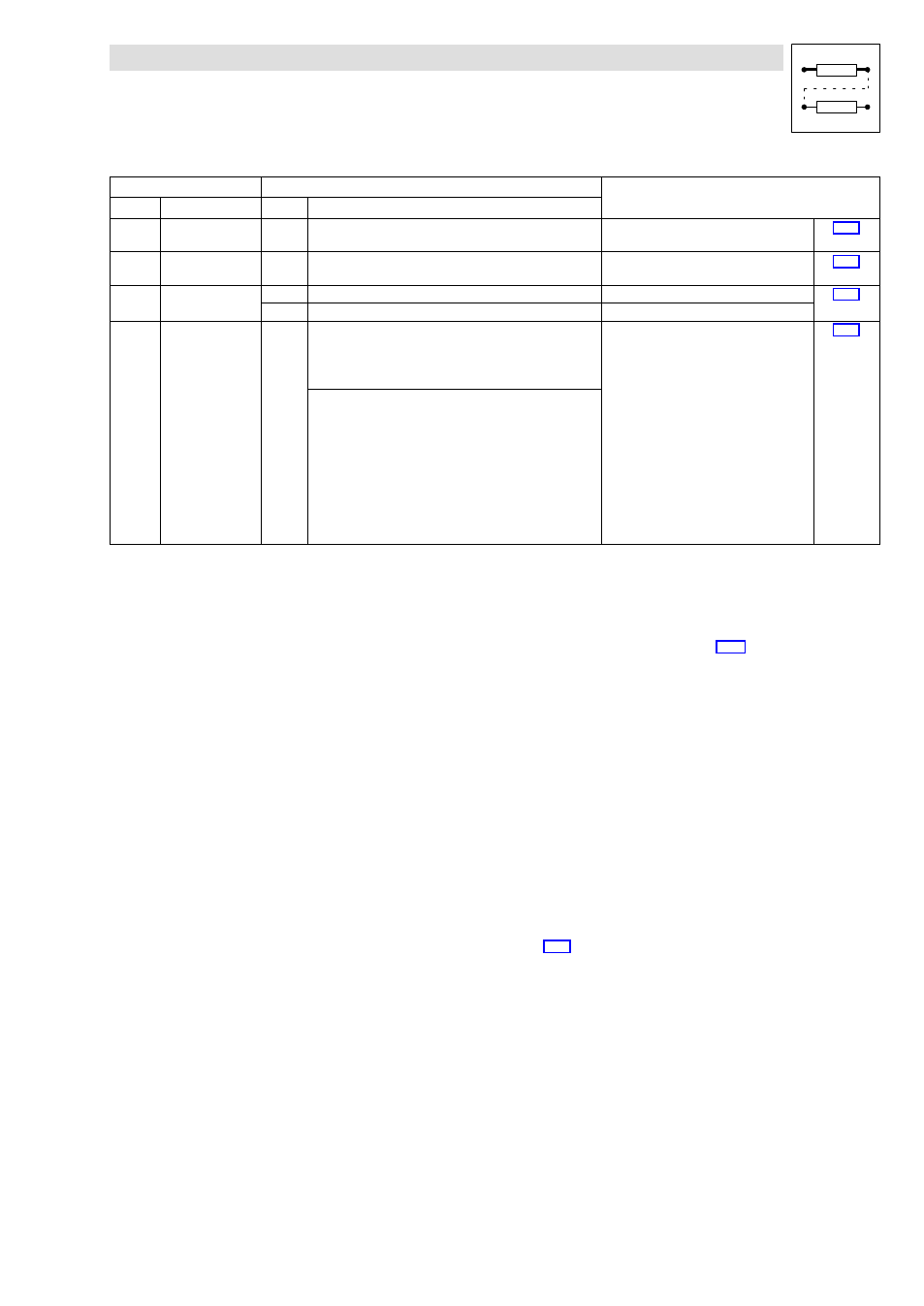
Code
IMPORTANT
Possible settings
No.
Selection
Lenze
Name
C0090
Rated motor
voltage
à
50
{1 V}
500
à
230 V with 230 V controllers,
400 V with 400 V controllers
^ 7−48
C0091
Motor cos
ϕ
а
0.40
{0.1}
1.0
а
Depending on the controller
^ 7−48
C0092
Motor stator
inductance
0.0
0.000
{0.1 mH}
200.0
^ 7−48
0.00
0.00
{0.01 mH}
200.00 Only 8200 vector 15 ... 90 kW
C0148*
s
Motor parameter
identification
0
0
Ready
Only when the motor is cold!
1. Inhibit controller, wait until drive is at
standstill
2. Enter the correct motor data under
C0087, C0088, C0089, C0090, C0091
(see motor nameplate).
3. Set C0148 = 1 by
v
4. Enable controller
The identification
– starts,
c
goes off
– the motor makes a high−pitched tone,
but does not rotate!
– takes approx. 30 s
– is completed when
c
is on again
5. Inhibit controller
^ 7−48
1
Start identification
·
V/f−rated frequency (C0015), slip
compensation (C0021) and motor stator
inductivity (C0092) are calculated and saved.
·
The motor stator resistance (C0084) = total
resistance of motor cable and motor is
measured and saved
Setting of torque control
Use C0014 = 5 to set the operating mode "sensorless torque control".
Linking setpoint and selecting speed limitation
Link an external setpoint source with the torque setpoint via C0412/6.
(
Select the type of speed limitation. The speed is limited via setpoint 1 or the maximum frequency:
·
Setpoint 1, if C0412/1 is linked with a setpoint source.
·
Maximum frequency, if C0412/1 is not assigned.
Preparing motor parameter identification
You must enter the motor data of the motor nameplate:
·
Rated motor speed (C0087)
·
Rated motor current (C0088)
·
Rated motor frequency (C0089)
·
Rated motor voltage (C0090)
·
Motor cos
j (C0091)
Motor parameter identification
Carry out the motor parameter identification. (
^ 7−48
)
Automatically detected parameters
V/f−rated frequency (C0015), slip compensation (C0021) and motor stator inductivity (C0092) are
calculated and saved. The total resistance of motor cable and motor is measured and saved as
motor stator resistance (C0084).